第2节 “小绿,跳舞!”制作自己的语音助手
通过深度学习的方式训练自己的声音模型,制作自己的语音助手,用语音来控制小绿的行动。
原理图
麦克风阵列->树莓派: GPIO
树莓派-->小绿: WiFi
Note right of 树莓派: 处理麦克风语音数据\n如“前进”、“跳舞”
树莓派-->小绿: 发送处理结果
Note right of 小绿: 动作执行
树莓派-->小白: WiFi
Note right of 树莓派: 处理麦克风语音数据\n如“左转”、“停车”
树莓派-->小白: 发送处理结果
Note right of 小白: 动作执行
树莓派-->RGB彩灯: 使用MQTT传递指令\n“开灯”、“关灯”
硬件准备
1.连接麦克风扩展板
通过对齐GPIO将扩展板固定在树莓派上
2.连接扬声器
将扬声器通过3.5mm耳机线连接到麦克风扩展板
3.设置基于ESP8266的RGB彩灯
使用基于WS2812的RGB彩灯,ESP8266通过MQTT(一种物联网轻量级通讯协议)与HomeAssistant通信
程序烧录过程略,程序源文件见~/Desktop/learn-ai/codes/chapter6/part3_VoiceAssistant/mqttlight
接通电源,使用杜邦线将彩灯的Data接到ESP8266的D3,GND和VCC分别接到对应位置
4.通过HDMI或ssh或远程桌面连接到树莓派
参数配置
rapiro项目文件夹在~目录下
参数配置时,可以使用命令行文本编辑工具nano或vim Nano:用法是
nano 文件名。退出时候按ctrl+w,需要保存按y,否则按n,然后按回车。 Vim:用法是vi 文件名。先按insert键,然后进行输入。要退出vi编辑器,按esc键,然后输入:wq,回车
1.调用参数配置~/rapiro/config.yaml
# 在http://yuyin.baidu.com/注册语音识别应用,获取ak、sk和id
baidu_yuyin:
api_key: 'qW5HLj4Ks6DfsCV2K9If5O80'
secret_key: '37riCUCmGj1lfrhaGcyu11wWqCjvZbZR'
app_id: '9217941'
homeassistant:
url: 'http://localhost'
port: '8123'
password: 'welcome'
# 在http://www.turingapi.com/注册机器人,获取key
tuling:
key: 'be4efe7298b24d0d8c9b5542dd56671a'
2.机器人网络配置~/rapiro/opiro.py
#!coding:utf-8
import os
import time
import requests
class rapiro:
def __init__(self,ip):
#把双引号里的地址替换为小绿的ip地址
self.ip = "http://192.168.123.184"
self.actions = {
"停止":'/otto-home',
"小绿前进":'/otto-walk',
"小绿后退":'/otto-walk-back',
"小绿挥手":'/wave-hands',
"小绿左转":'/otto-turn',
"小绿右转":'/otto-turn-right',
"""
适用于小白的命令
"小白前进":'/get?command=forward'
"小白后退":'/get?command=backward'
"""
}
def get(self,url):
r = requests.get(self.ip+url)
print(r.text)
def do(self,action):
method = self.actions.get(action,None)
if(method):
self.get(method)
print("rapiro " + action)
def isValid(self,text):
for key in self.actions.keys():
if(key in text):
return key
return None
if __name__ == '__main__':
#把双引号里的地址替换为小绿的ip地址
rap = rapiro('http://192.168.123.184')
action = rap.isValid('前进')
print(action)
if action:
rap.do(action)
#rap.do("前进")
time.sleep(4)
rap.do("挥手")
time.sleep(4)
rap.do("停止")
3.核心文件配置~/rapiro/server.py
……
# 第84行 把引号里的地址替换为小绿的ip地址
rap = rapiro('http://192.168.123.184')
……
4.关键词触发优化~/rapiro/handle.py
#!coding:utf-8
from rapiro import *
rap = rapiro()
def handle(str):
# 仿照下一行的格式,补充更多的关键词,优化小绿的智力
# 如果语句命令中包含关键词,则将会识别为对应的机器人指令
cmds = ["前进","后退","左转","右转","停止"]
for cmd in cmds:
if(cmd in str):
rap.do(cmd)
break
5.声音设备配置~/.asoundrc
# 使用`aplay -l`和`arecord -l`查看wm8960soundcard对应的card和device号码。
# 例如,如果aplay对应的card和device分别是1和0,
# 则在playback.pcm处的双引号内填入`hw:1,0`,
# arecord则在capture.pcm处填写。
pcm.!default {
type asym
playback.pcm {
type plug
slave.pcm "hw:1,0"
}
capture.pcm {
type plug
slave.pcm "hw:1,0"
}
}
6.语音助手设置~/homeassistant/configuration.yaml
……
……
……
conversation:
intents:
# 意图类型(名称),以及对应的语法匹配规则
OpenLight:
- 打开{item}灯
- 把{item}灯打开
CloseLight:
- 关上{item}灯
- 关闭{item}灯
intent_script:
# 意图类型(名称)
OpenLight:
# speech返回
speech:
text: 已打开{{ item }}灯
# 执行动作
action:
service: light.turn_on
data_template:
entity_id: >
{% if item=="教室" %}
light.classroom_light_rgb
{% endif %}
CloseLight:
speech:
text: 已关闭{{ item }}灯
action:
service: light.turn_off
data_template:
entity_id: >
{% if item=="教室" %}
light.classroom_light_rgb
{% endif %}
mqtt:
broker: 127.0.0.1
port: 1883
light:
- platform: mqtt
name: "Classroom Light RGB"
state_topic: "classroom/rgb1/light/status"
command_topic: "classroom/rgb1/light/switch"
brightness_state_topic: "classroom/rgb1/brightness/status"
brightness_command_topic: "classroom/rgb1/brightness/set"
rgb_state_topic: "classroom/rgb1/rgb/status"
rgb_command_topic: "classroom/rgb1/rgb/set"
state_value_template: "{{ value_json.state }}"
brightness_value_template: "{{ value_json.brightness }}"
rgb_value_template: "{{ value_json.rgb | join(',') }}"
qos: 0
payload_on: "ON"
payload_off: "OFF"
optimistic: false
训练自己的语音模型
语音唤醒模型的训练是基于深度神经网络的训练。采用神经网络作为特征提取器,把声波信息转化为多维特征向量输入到深度神经网络(DNN)中,进行训练,得到模型。

嘿,Siri! OK,Google! 小爱同学! 小度小度!
这些是主流的语音助手的唤醒词。小绿也有自己的唤醒词。
当我们呼唤他小绿的时候,他就会回应。这是因为已经提前训练好的识别文件green.pmbl
当然,我们可以训练自己独特的唤醒词。你想要叫他什么?叫什么都可以~只需要稍微的训练一下,得到一个识别文件就可以了。
1.登陆网址叫我的机器人什么好呢
你需要有一个GitHub账号,然后在右上角选择Login with GitHub
- 登陆后的界面:

2.Create Hotword

3.选择右下角的Record my voice
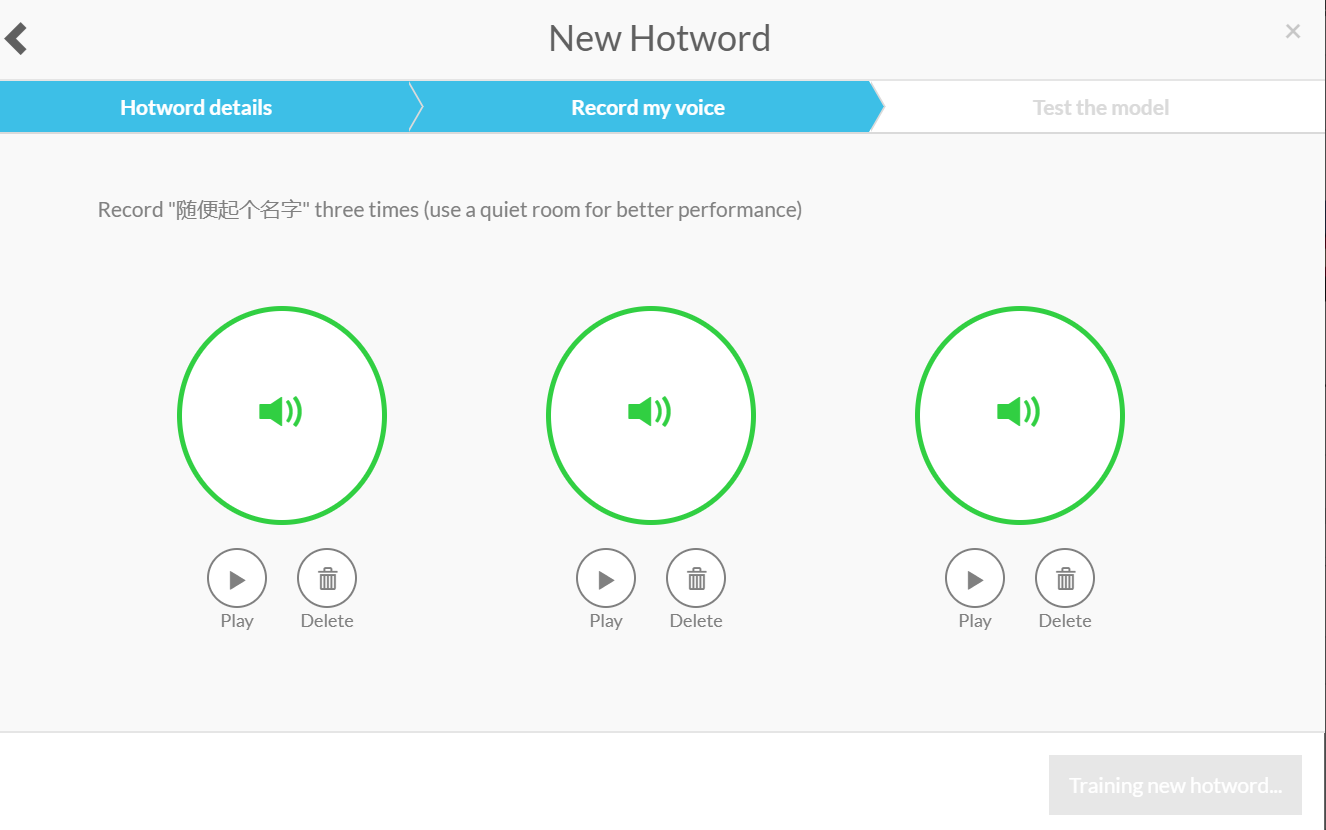
4.录制3个样本后,点击右下角的按钮进行模型训练
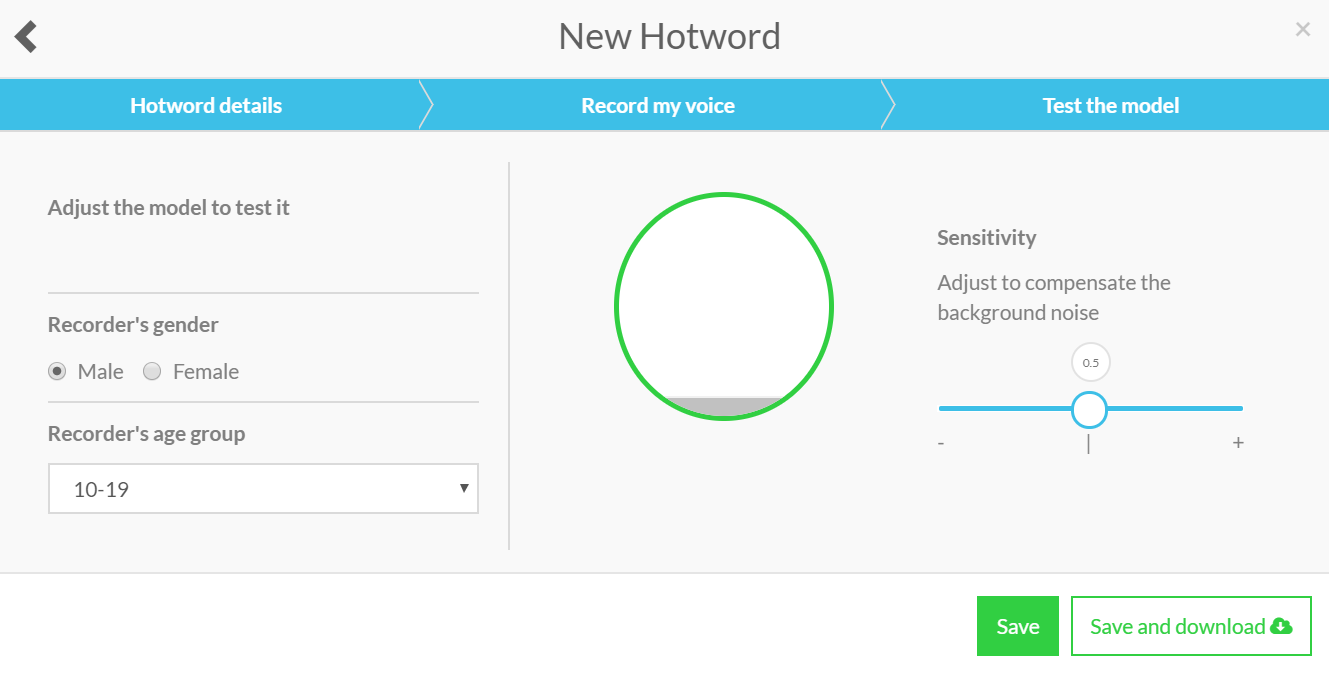
在左侧选择你的性别和年龄段,这是为了更加准确的调整模型。
然后在右侧说出唤醒词,通过调整灵敏度,逐渐调节到最优状态。然后点击Save and download
5.将下载好的模型文件放在项目文件夹
可以命名为myrobot.pmbl
启动小绿的语音助手系统
//先启动HomeAssistant
sudo docker start home-assistant
//启动小绿
cd ~/rapiro
python server.py green.pmdl
//或者使用自己训练的myrobot.pmbl
//python server.py myrobot.pmbl
对着麦克风说小绿,听到提示音后,说出你的问题。
你可以说今天的天气怎么样?、讲个笑话、小绿前进/后退/跳舞、小白前进/左转/停车、把灯打开/关闭等。
试着用你的唤醒词来叫醒机器人吧
与苹果家庭或谷歌家庭融合,使用Siri和Google Assistant来控制设备